HaptX Glove 和 Shadow Tactile Fingertips 是两种不同的、但可以结合使用的触觉反馈技术,旨在增强用户在虚拟现实 (VR)、机器人遥操作和其他应用中的沉浸感和交互能力。
 HaptX Glove
HaptX Glove
由 HaptX 公司开发的一种先进的外骨骼手套,旨在提供高度逼真的触觉和力觉反馈。
工作原理: HaptX Glove 的独特之处在于其使用微流体智能纺织品技术。手套内部衬有数百个微小的气动驱动器(气泡),这些驱动器可以根据虚拟环境或远程机器人的状态膨胀和收缩,从而对用户的皮肤施加精确的压力和纹理感。此外,HaptX Glove 还集成了力反馈机制,可以对手指施加阻力,模拟虚拟物体的形状、大小和重量。
主要特点:
真实的触觉反馈: 能够模拟各种表面纹理、形状和硬度。
力反馈: 提供高达每只手 40 磅的阻力,模拟物体的重量和物理性能。
精确的运动追踪: 集成亚毫米级的运动捕捉系统,能够准确追踪手部和手指的运动。
广泛的应用: 适用于 VR 培训、机器人遥操作、设计和工程等领域。

Shadow Tactile Fingertips
由 Shadow Robot Company 开发的一种触觉传感器,可以集成到他们的 Shadow Dexterous Hand (灵巧手) 或其他机器人手上。
工作原理: 这些传感器通常位于机器人手指的指尖,旨在模仿人类手指的触觉能力。它们可以感知多种触觉信息,例如接触力、压力分布、温度和振动。
主要特点:
多模态传感: 能够感知多种触觉参数。
高灵敏度: 可以捕捉到非常细微的触觉变化。
与 Shadow Dexterous Hand 集成: 专门为 Shadow Robot 的灵巧手设计,能够提供高质量的触觉数据。
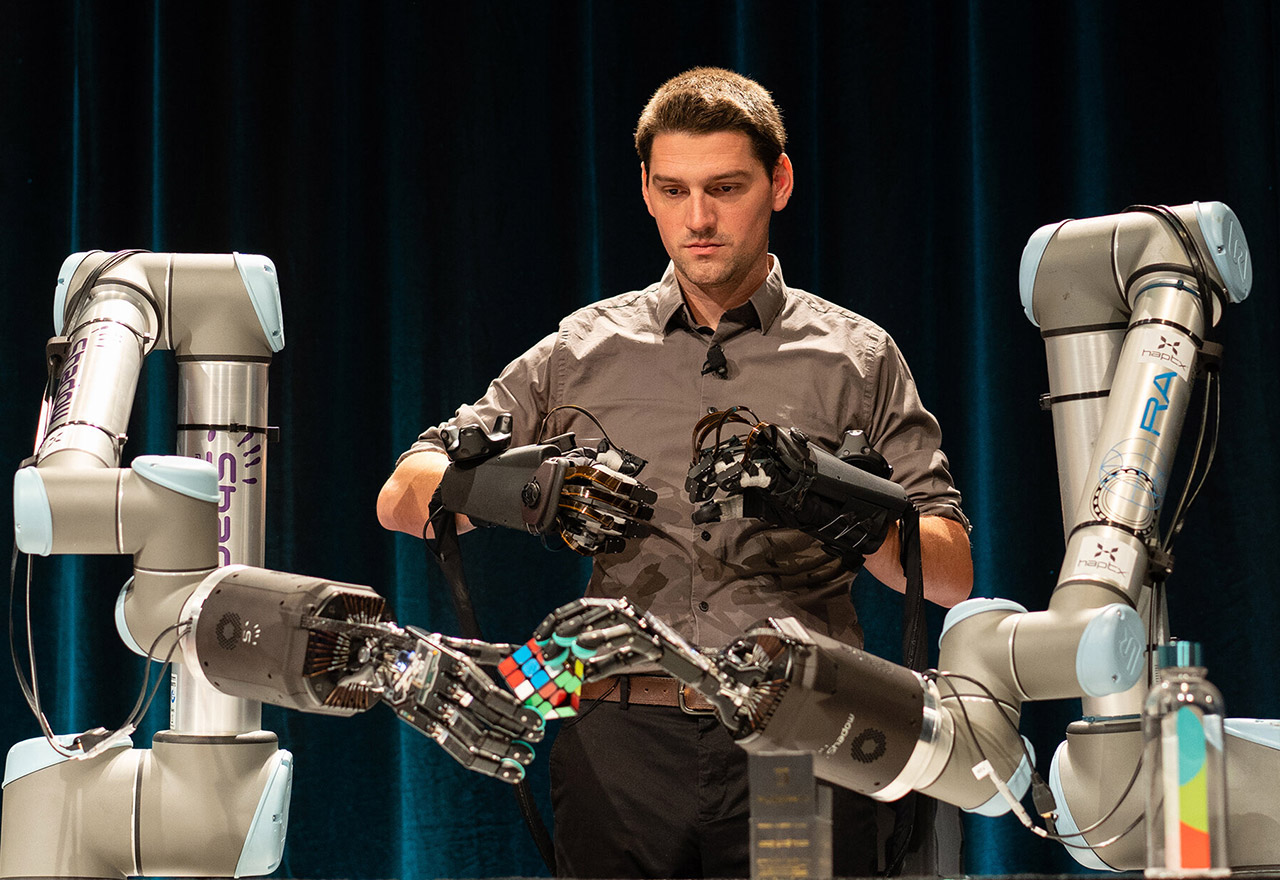
在遥操作系统中的作用: 当 Shadow Tactile Fingertips 集成到机器人手上,并与操作员佩戴的力反馈手套(例如 HaptX Glove)结合使用时,可以实现触觉遥操作。机器人手感知到的触觉信息会通过系统传输到操作员的手上,使操作员能够“感觉”到远程环境和被操作的物体,从而进行更精确和灵巧的控制。

总结:
HaptX Glove 是一种穿戴式设备,旨在为用户提供虚拟环境中的触觉和力觉体验。
Shadow Tactile Fingertips 是一种传感器技术,旨在赋予机器人手触觉感知能力。
这两者可以结合使用在机器人遥操作系统中,创建一个双向的触觉反馈回路:
操作员佩戴 HaptX Glove 控制 Shadow Dexterous Hand 的运动。
Shadow Tactile Fingertips 传感器感知机器人手与环境的接触信息。
这些触觉信息通过系统反馈到操作员佩戴的 HaptX Glove,让操作员感受到远程环境的触觉。
这种结合使得远程操作更加直观、精确和安全,尤其是在需要精细操作和对环境有良好感知的应用场景中。例如,操作员可以通过 HaptX Glove 感觉到机器人手抓握物体的力度和形状,从而避免损坏物体或操作失败。