Shadow遥操作系统 (Teleoperation System) 是一套先进的解决方案,旨在实现对其高精度灵巧手进行直观的远程控制。这套系统使得操作人员能够在安全、无菌或遥远的环境中,通过模仿自身手部的自然动作来精确地操控机器人手,实现人机协同操作和远程作业,完成复杂的任务。

Shadow 遥操作系统的核心组成部分:
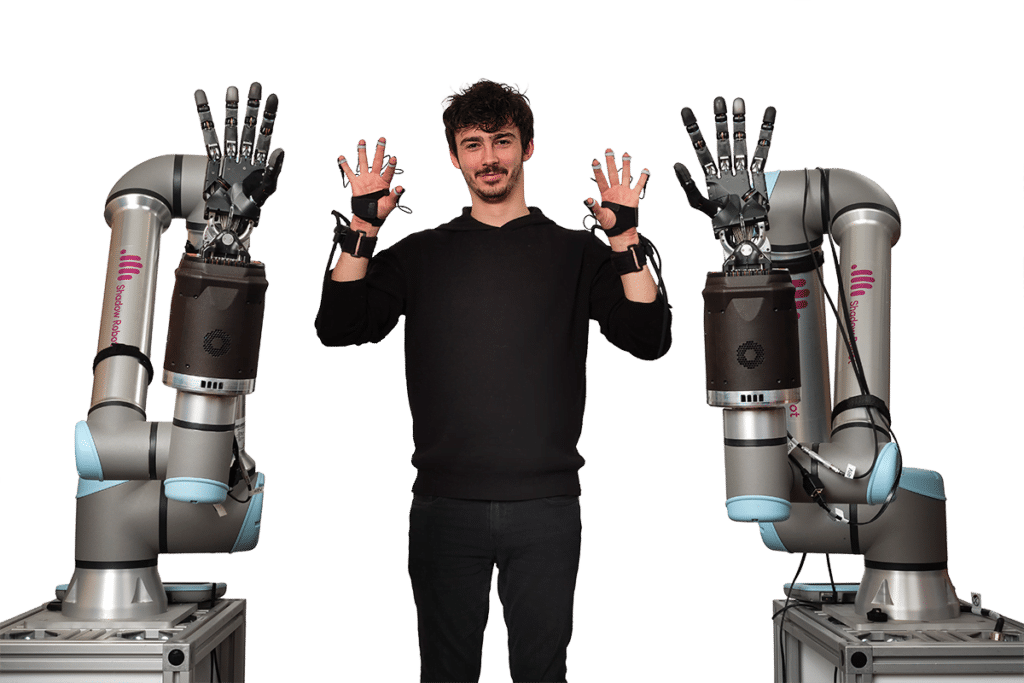
主端控制界面 (Master Control Interface - 用户端):
Shadow Glove (影子手套): 操作人员佩戴的轻便、符合人体工程学的手套。它通过传感器追踪操作人员的手指和手部的运动(位置和方向),能够捕捉前臂、手掌和指尖的六自由度运动。
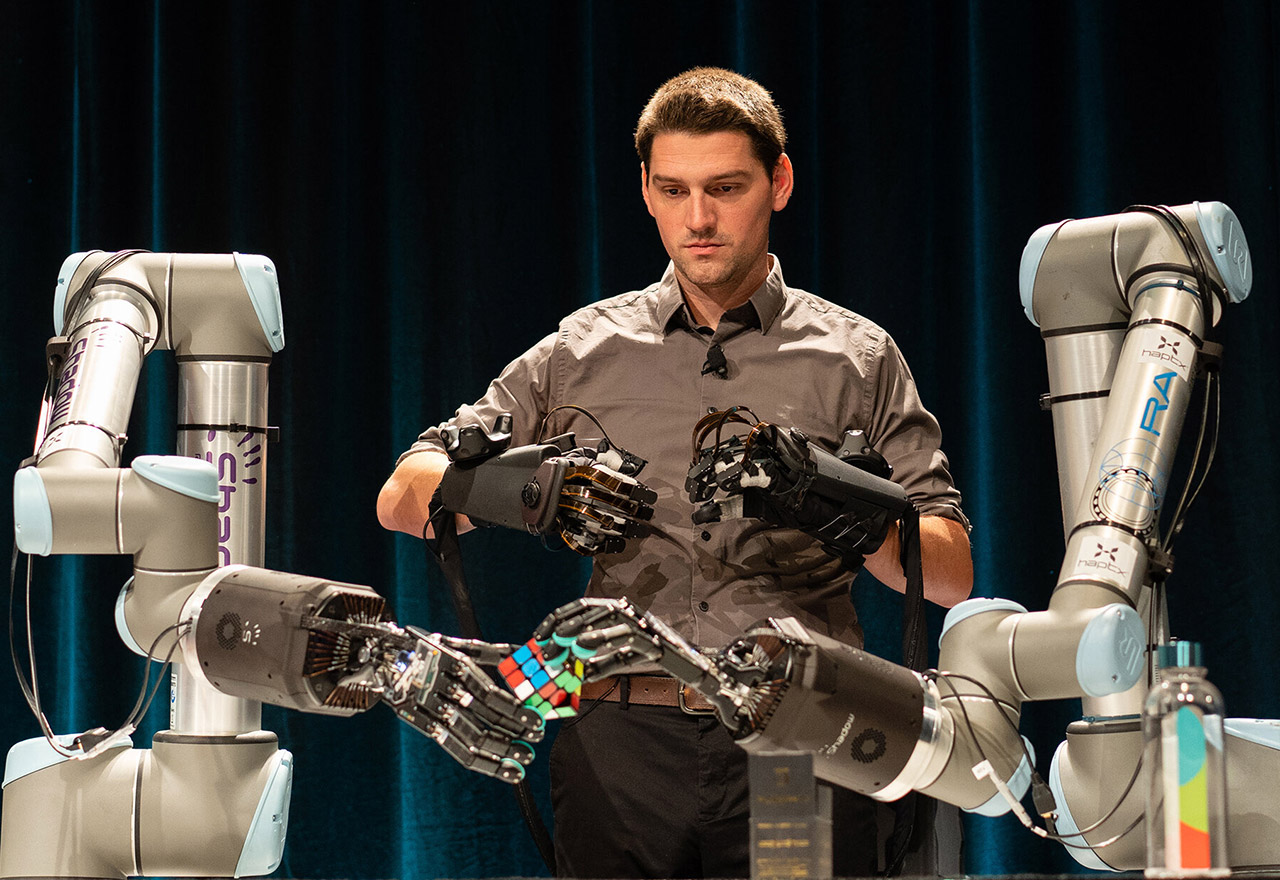
力反馈 (可选): 系统可以集成力反馈手套,例如 Shadow Tactile Fingertips 或 HaptX Gloves。这些设备能够向操作人员提供真实的触觉和力觉反馈,使其能够感受到机器人手正在操作的物体的表面纹理和抓握力度,从而显著提高控制的直观性和精确性。
其他输入设备: 根据具体应用,系统可能还会集成脚踏板(用于离合或模式切换等操作)或其他辅助控制装置。

通信链路 (Communication Link):
系统采用可靠的通信协议(可能是 Wi-Fi 或 5G 用于远程操作),以最小的延迟传输控制指令并接收来自机器人端的传感器数据(包括视觉、触觉、力觉等)。低延迟对于自然且响应迅速的遥操作体验至关重要。
从端机器人单元 (Slave Robot Unit - 远端):
关节中的位置传感器,用于精确的运动复制。
力传感器,用于测量机器人手施加的力。
指尖上的触觉传感器(如 Shadow Tactile Fingertips 或 SynTouch BioTac 传感器),用于提供详细的接触信息。
可能还包括视觉系统,用于环境感知。
Shadow Dexterous Hand (影子灵巧手): 系统的核心执行机构,能够以其 20 个主动自由度(24 个运动)精确地复制操作人员的手部动作。
机器人手臂 (Robot Arm): 灵巧手通常安装在六自由度的工业机器人手臂(通常是 Universal Robots UR10e)上,以扩展系统的工作范围和灵活性。
传感器 (Sensors): 机器人手和手臂配备各种传感器,包括:
控制软件和系统 (Control Software and System):
专用的控制电脑运行实时操作系统,管理通信、运动映射和力反馈算法。
复杂的软件将操作人员的手部运动转化为机器人手和手臂的精确关节指令。
算法处理人手运动学到机器人运动学的映射,确保机器人手的动作与操作人员的意图一致。
软件还管理反馈回路,将来自机器人端的触觉和力觉信息发送回操作人员的力反馈手套。
用户界面提供远程环境和机器人状态的可视化。
主要特点和优势:
直观的控制 (Intuitive Control): 基于手套的界面实现了自然且直观的操作,最大限度地减少了培训需求。
高度的灵巧性 (High Dexterity): 充分利用了 Shadow Dexterous Hand 无与伦比的灵巧性,能够完成复杂的任务。
远程操作 (Remote Operation): 能够在房间甚至跨越大陆的距离进行操作,适用于远程协作以及在危险或无菌环境中工作。
触觉反馈 (Haptic Feedback): 当与触觉手套集成时,能够提供触摸感,显著提高控制精度和与远程物体交互的能力。
模块化和可定制性 (Modularity and Customization): 系统设计为模块化,允许不同的配置(单手或双手控制)以及与现有设备的集成。可以根据特定的用户需求进行定制。
安全性 (Safety): 特别是在机器人与人类共享工作空间时(例如使用协作机器人手臂),系统设计考虑了安全性。
数据记录和分析 (Data Logging and Analysis): 系统可以记录数据,这对于机械分析、机器学习和人工智能应用非常有价值。
ROS 集成 (ROS Integration): 完全集成了机器人操作系统 (ROS),使其成为研究和开发的强大平台。

应用领域:
Shadow 遥操作系统适用于各种领域,包括:
核工业 (Nuclear): 远程处理放射性物质和退役任务。
制药业 (Pharmaceutical): 维护洁净环境和进行精细操作。
维护和维修 (Maintenance and Repair): 在危险或难以接近的地点进行远程维护。
科研 (Research): 为机器人研究、人工智能和机器学习在复杂操作任务中的应用提供平台。
太空探索 (Space Exploration): 在太空环境中进行远程操作。
应急响应 (Emergency Response): 远程处理危险材料或紧急情况。