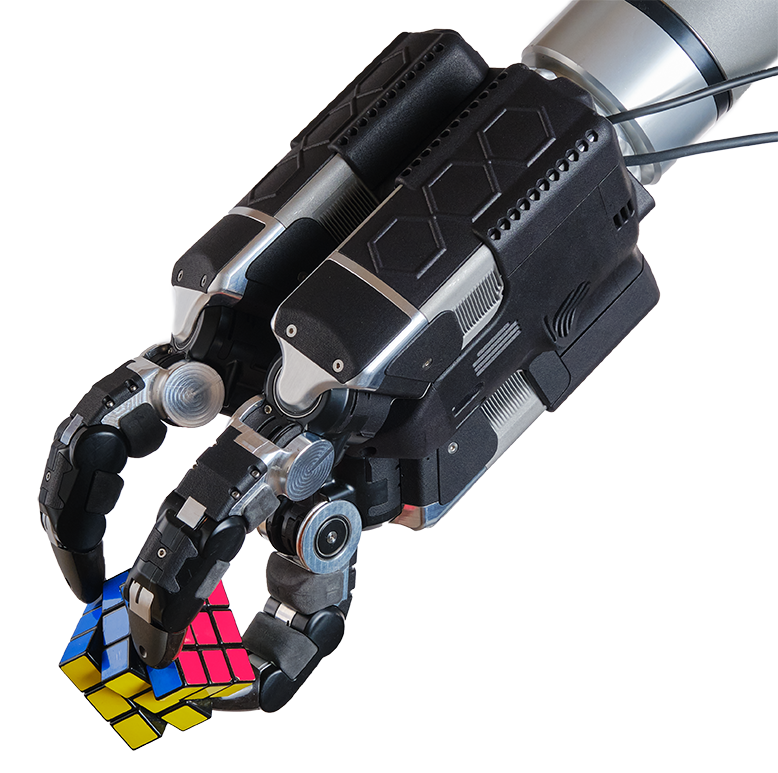
Shadow Dex-EE 是由英国的 Shadow Robot Company(影子机器人公司)与 Google DeepMind 合作开发的一款新型灵巧机器人手。与 Shadow Robot 著名的五指灵巧手不同,Dex-EE 采用了三根手指的设计,并且在尺寸上比人类的手大约大 50%。这款设计并非为了完全模仿人类手的外观,而是为了更好地满足特定应用场景的需求,尤其是在人工智能和机器学习研究领域中,对高灵敏度、高鲁棒性和丰富的数据采集的要求。
主要特点和优势:
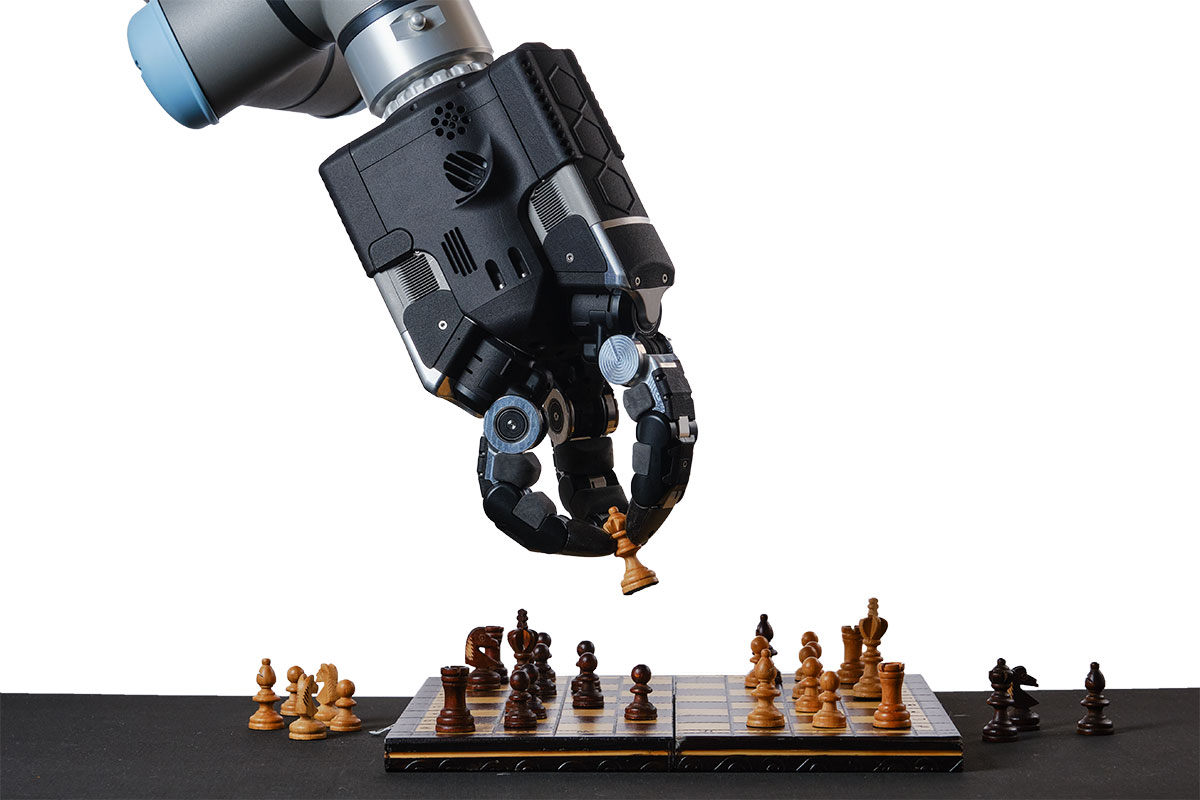
三指坚固设计 (Robust Three-Finger Design): 采用三根坚固的手指,使其在执行某些任务时更加稳定和可靠,能够承受实际应用中可能遇到的冲击和磨损。
更大的尺寸 (Larger Size): 比人类手大约 50% 的尺寸,可能在某些操作和抓握方面提供额外的优势。
高速传感器网络 (High-Speed Sensor Networks): 配备了高速传感器网络,能够提供丰富的数据,包括:
位置 (Position): 精确的关节位置反馈。
力量 (Force): 对作用力的感知。
惯性测量 (Inertial Measurement): 手部的运动状态信息。
高密度的触觉传感 (High-Density Tactile Sensing): 每根手指都配备了数百个触觉传感通道,能够实现非常精细的压力感应,接近人类手的水平。这对于理解与物体的接触和进行灵巧操作至关重要。
独特的驱动系统 (Unique Drive System): 采用了独特的肌腱驱动系统,每个关节使用多个电机,而不是传统的单电机方案。这种设计使得每个关节都能够模拟零扭矩状态,从而实现极其灵敏的运动控制,并能够安全地处理精细物体。
高鲁棒性和可靠性 (High Robustness and Reliability): 专为长时间运行的强化学习实验而设计,具有较长的平均故障间隔时间(Mean Time To Failure),并减少了维修时间,从而提高了可用性。能够抵抗来自环境的重复冲击和未经训练的策略的粗暴使用。
为 AI 和机器学习优化 (Optimized for AI and Machine Learning): 其丰富的高质量、高速传感器数据非常适合用于训练人工智能模型进行复杂的操控任务。
ROS 集成 (ROS Integration): 能够完全集成到机器人操作系统 ROS 中,方便研究人员进行算法开发和应用。
应用领域:
Shadow Dex-EE 三指灵巧手主要面向以下领域:
人工智能 (AI) 研究: 作为理想的硬件平台,用于进行灵巧操作和机器学习的研究。其高灵敏度和鲁棒性使其能够应对长时间、高强度的实验。
机器学习 (Machine Learning): 特别适用于强化学习等需要大量真实世界数据进行训练的场景。
机器人研究 (Robotics Research): 用于探索先进的机器人操控技术和算法。

与 Shadow Dexterous Hand (五指灵巧手) 的区别:
主要的区别在于手指的数量和设计的侧重点。五指灵巧手旨在尽可能地模仿人类手的全部功能和灵活性,而 Dex-EE 三指手则在保证足够灵巧性的前提下,更加强调鲁棒性和丰富的数据采集能力,以更好地服务于 AI 和机器学习研究。Dex-EE 的尺寸也更大,这可能牺牲了一部分精细操作的能力,但提升了稳定性和力量。
总而言之,Shadow Dex-EE 三指灵巧手是一款专为满足人工智能和机器学习研究需求而设计的高性能机器人手。其独特的三指设计、强大的传感能力和高鲁棒性使其成为该领域一个重要的研究工具。