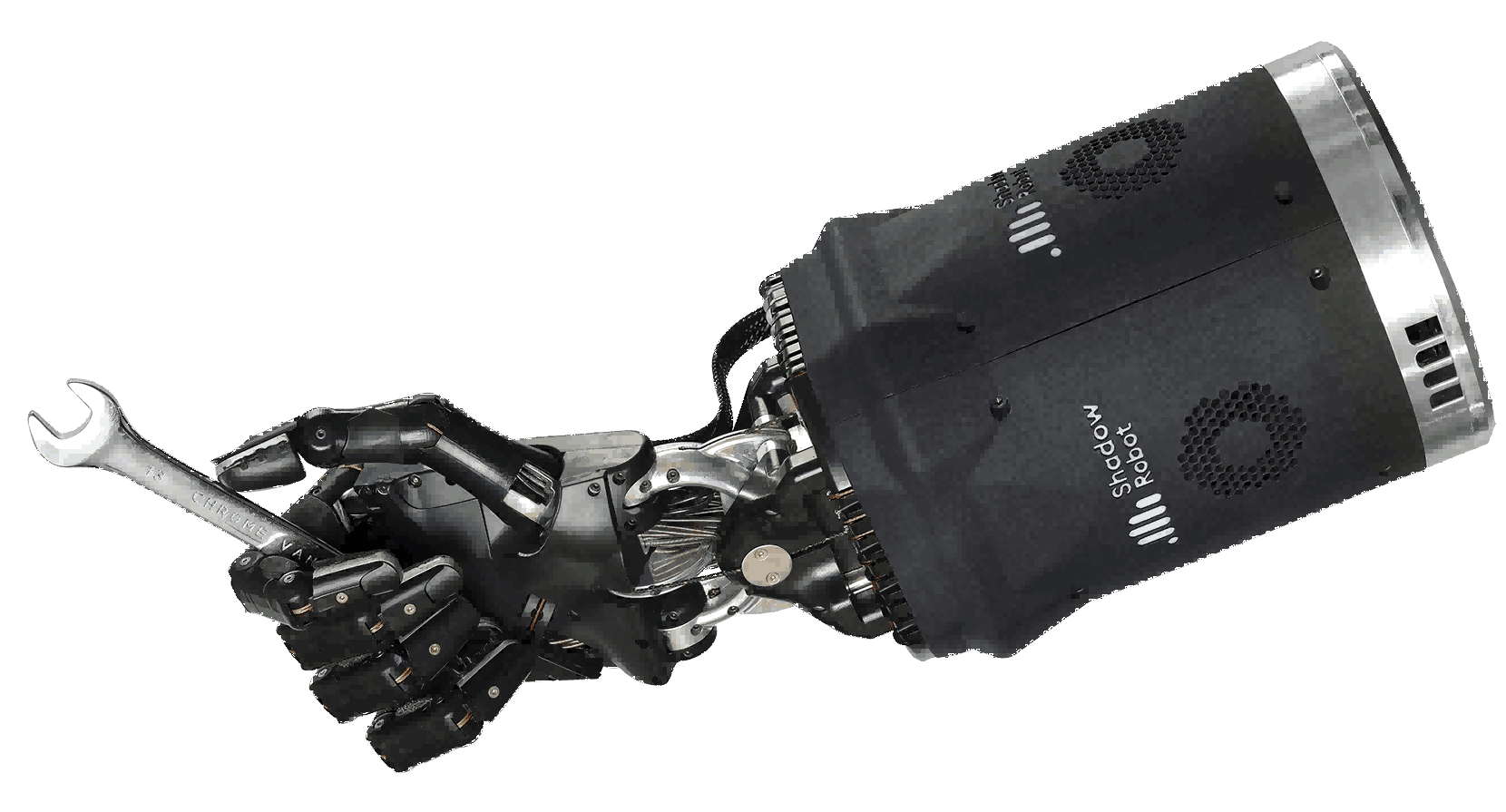
Shadow Dexterous Hand 是由英国的 Shadow Robot Company(影子机器人公司)开发的一种高度先进的、拟人化的机器人手。它的设计目标是尽可能地复制人类手的大小、形状,以及最关键的——灵活性和操作能力。
 主要特点和规格:
主要特点和规格:
拟人化设计 (Anthropomorphic Design): 它的尺寸和运动范围都非常接近一个普通男性人类的手。
自由度 (Degrees of Freedom, DoF): 这只手拥有 20 个主动自由度 和 4 个欠驱动运动,总共有 24 个关节。如此高的自由度使其能够进行非常复杂和精细的操作。
关节设计 (Joint Design):
四根手指 (食指、中指、无名指、小指): 每根手指有 3 个主动自由度和 4 个关节。最远端的两个关节是耦合的,类似于人类的手指。
拇指 (Thumb): 拇指拥有 5 个主动自由度和 5 个关节,包括一个用于掌心弯曲的关节。
小指 (Little Finger): 小指在手掌中还有一个额外的关节,使其能够更好地与拇指相对。
大部分关节的控制精度可以达到 +/- 1 度。
驱动方式 (Actuation): 提供两种主要的驱动方式:
电动马达驱动 (Electric Motor Driven Model): 由安装在前臂中的 20 个直流电机驱动。
气动肌肉驱动 (Pneumatic Muscle Driven Model): 由安装在前臂中的 20 对气动肌肉(仿生肌肉)驱动。
传感器 (Sensing): 集成了多种传感器以实现精确的控制和反馈:
位置传感器 (Position Sensors): 每个关节都配备霍尔效应传感器,用于精确的位置反馈。
力传感器 (Force Sensors): 电动马达驱动版本在每个自由度上都包含力传感器。
压力传感器 (Pressure Sensors): 气动肌肉驱动版本在每条肌肉上都包含压力传感器。
触觉传感器 (Tactile Sensors): 指尖上配备超灵敏的触觉传感器。一些版本还在手掌和指骨上配备了触觉传感器。
其他传感器 (Other Sensors): 部分型号还包含六轴陀螺仪和加速度计、温度传感器以及电机电流/电压传感器。
材料 (Materials): 主要由金属(铝、黄铜)和塑料(聚甲醛、聚碳酸酯、聚氨酯“皮肤”)构成。
尺寸和重量 (Size and Weight): 尺寸与人类男性手相似,手和前臂的总重量约为 4.3 公斤。
有效载荷 (Payload): 在强力抓握下可以承受高达 5 公斤的重量。
速度 (Speed): 运动速度取决于安全设置,但在自由空间中,典型的参数允许关节在约 1.0 赫兹的频率下进行全范围运动。手从完全张开到完全闭合大约需要 0.5 秒。
通信 (Communication): 使用 EtherCAT 总线进行高带宽通信(高达 1 kHz 的数据速率)。
软件集成 (Software Integration): 完全集成了 ROS (Robot Operating System,机器人操作系统),并提供相应的实体模型和代码。用户可以在 ROS 中修改控制算法。固件也可以根据需求提供修改。

应用领域:
Shadow Dexterous Hand 由于其先进的性能,被广泛应用于以下领域:
机器人研究 (Robotics Research): 作为研究抓取、操作和灵巧性的重要平台。
人工智能 (Artificial Intelligence, AI) 研究: 用于通过机器学习和强化学习训练 AI 模型进行复杂的物体操作任务(例如 OpenAI 的 Dactyl 项目,Google Brain 项目)。
遥操作 (Teleoperation): 结合触觉手套(如 Shadow Glove),可以实现对危险或遥远环境中的物体进行直观的远程控制(例如太空探索、深海探索、处理危险材料、洁净室操作)。
脑机接口 (Brain-Computer Interface, BCI) 研究: 用于探索神经控制机器人肢体的项目。
工业质量控制 (Industrial Quality Control): 用于需要精细操作和检测的任务。
太空研究 (Space Research): 被 NASA、ESA 和 JAXA 等机构用于太空环境下的操作研究。
人机交互 (Human-Robot Interaction): 研究人类如何与高灵巧度的机器人手进行交互和控制。
假肢研究 (Prosthetics Research): 虽然本身不是假肢,但其技术为先进假肢的开发提供了重要的借鉴。