优傲机器人(Universal Robots,UR)的双臂协作方案是一种结合两台或多台UR协作机器人协同工作的自动化解决方案,适用于需要高精度同步、复杂装配或人机协作的场景。以下是该方案的核心要素和应用方向:
1. 方案架构
硬件配置
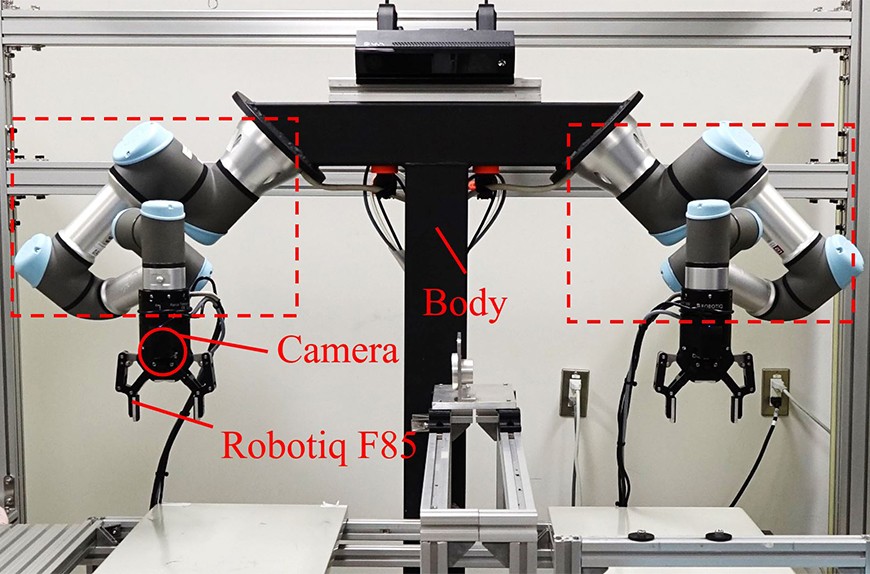
机器人选型:通常选用UR5e、UR10e或UR16e(根据负载和臂展需求),双臂对称或非对称布局。
安装方式:双臂可固定在同一基座、独立基座或倒置安装,适应不同工作空间。
末端工具:夹爪、吸盘、力控传感器、视觉相机等,支持工具快换系统(如Robotiq Hand-E)。
通信与控制
主控系统:通过外部工控机(如PLC、IPC)或URCap插件实现双臂同步控制。
通信协议:EtherCAT、TCP/IP、Modbus或ROS/ROS2(机器人操作系统)实现实时数据交互。
编程方式:
URScript:通过UR的Polyscope界面编写脚本,定义双臂协同逻辑。
外部SDK:使用UR的RTDE(实时数据接口)或ROS驱动进行高级控制。
2. 关键技术
路径规划与避碰:通过算法(如RRT*、APF)确保双臂运动轨迹无冲突。
力控协作:利用UR内置的力/力矩传感器,实现柔顺装配、精密插接(如电子元件组装)。
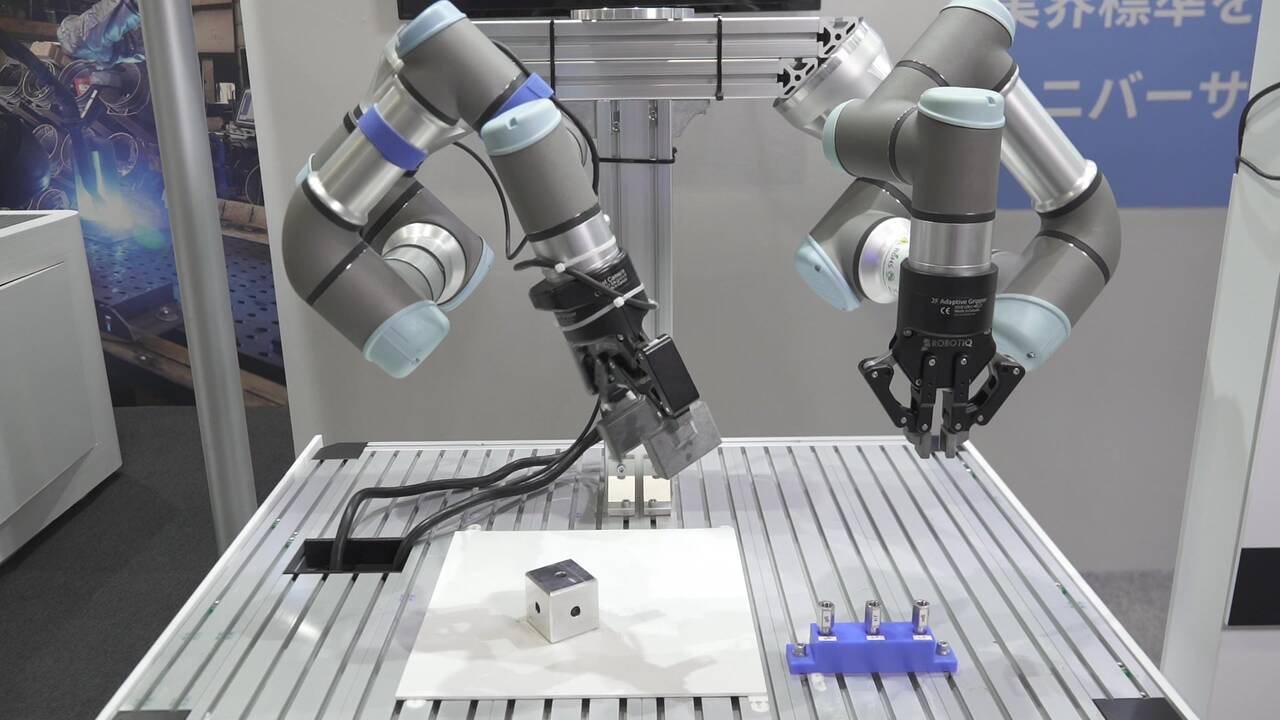
视觉引导:双目视觉或3D相机(如Zivid、Photoneo)提供空间定位,动态调整双臂动作。
数字孪生:通过仿真软件(如URSim、RoboDK)预演双臂协作流程,优化节拍和安全性。

3. 典型应用场景
精密装配:电子设备(如手机、电路板)的双工位组装,双臂协同完成拧螺丝、部件对接。
物料搬运:双臂协同抓取大尺寸或柔性物体(如玻璃面板、食品包装),避免变形。
人机协作:工人与双臂机器人共享工作空间(如医疗设备组装),机器人递送工具、辅助定位。
检测与包装:一臂抓取产品,另一臂进行视觉检测或贴标,提升产线效率。
4. 方案优势
灵活性:UR机器人轻量化、部署快,支持快速换产。
安全性:通过ISO 10218认证,具备碰撞检测和功率限制功能,适合人机协作环境。
低成本:相比传统工业机器人,UR协作机器人投资更低,ROI周期短。

5. 实施步骤
需求分析:确定负载、精度、协作模式(主从/并行)及安全区域。
系统集成:选择双臂控制器、通信模块及末端工具。
编程与调试:通过Polyscope或ROS配置协同逻辑,优化节拍和路径。
验证与部署:利用仿真测试后现场调试,确保安全性和效率。
6. 案例参考
汽车行业:双臂协同安装汽车内饰件,一臂固定部件,另一臂拧紧螺栓。
3C行业:双臂配合完成手机屏幕的撕膜、清洁与贴合。
食品行业:双臂协作分拣不规则形状的食品,装入包装盒。
高校科研:双臂传递物体,实现动态抓取交接。

还在为应用场景落地而困扰?智鑫宇科技专注为高校及科研机构提供开箱即用的协作机器人解决方案,量身打造智能化升级路径。即刻预约即可尊享专属服务方案,专业技术团队全程护航数字化转型进程。致电或邮件联系,获取定制化实施规划。在线客服/免费热线:15323501206(微信同步)