电子商务的发展和不断增长的订单量亟需协作式码垛
 利用协作机器人简化码垛操作。轻量化的协作式机械臂,可实现自动化的物料搬运,从而将工人从重复繁重的工作中解放出来。自动化流程不仅能够降低新产品包装成本,缩短产品生命周期,还能缓解劳动力短缺问题,让您轻松应对季节性高峰。
利用协作机器人简化码垛操作。轻量化的协作式机械臂,可实现自动化的物料搬运,从而将工人从重复繁重的工作中解放出来。自动化流程不仅能够降低新产品包装成本,缩短产品生命周期,还能缓解劳动力短缺问题,让您轻松应对季节性高峰。
协作机器人集成创新夹具、计算机视觉和机器学习系统,能够在非结构化的环境(例如垃圾箱或搬运箱)中拾取各种物体。
优傲机器人拥有直观且易于编程的界面,非常适合小批量应用以及高重复性任务。您可以根据需要在整个操作过程中对机器人进行重新编程和部署。物料搬运机械臂采用轻量化设计,外形小巧,即使需要改变工作流程,您也能对其进行轻松快速地部署。
机器人码垛工作站设计原则

1. 有效载荷
关于有效载荷,需要记住的两个最重要的因素:第一,搬运的箱子和产品的重量;第二,根据应用和传送带输送量,您的码垛应用是否应设置为同时处理多个箱子。
2. 选择夹具
虽然臂端工具只占码垛应用成本的一小部分,但它通常是花费大量工程时间和精力的地方。如果您的码垛应用已逼近协作机器人的有效载荷限值,那么您就要寻找安全、轻便的夹具。
3. 占地面积
由于大多数生产设施的空间有限,占地面积是码垛应用的一个关键考虑因素。在精心设计的码垛应用中,占用空间最大的项目不是协作机器人码垛系统,而是托盘。
大多数码垛应用都采用双托盘设置,协作机器人在等待第一个已装满托盘被收取的同时,可以在第二个托盘上继续码垛。一般而言,您应尽可能确保占地面积不超过两个托盘的大小。
4. 堆垛模式
大多数设施希望将托盘堆放到货运卡车和集装箱允许的最大高度。这时就应该考虑堆垛模式,因为堆垛模式会影响到已装满的托盘的整体稳定性。
5. 安全
码垛应用需要进行风险评估,因为这些应用经常会在工人眼睛的平齐高度移动重物,而且码垛是通常需要一定速度才能有效完成的一项工艺流程。由于涉及潜在的风险,码垛单元周围可能需要设置防护。然而,协作机器人非常灵活,易于安装和编程,因此,即使需要安全措施,也有必要部署协作机器人而非传统机器人。
常见的码垛机器人工作站配置
设置码垛应用有许多种方法,选择哪种方法取决于所处理的产品类型和码垛作业的处理量。如上所述,码垛通常采用双托盘设置,因为双托盘可以最大限度地发挥协作机器人的码垛能力,在装满一个托盘时,协作机器人可以立即开始装载第二个托盘。但在设计码垛单元时,仍有其他值得考虑的因素和特点。
 | 方案一:固定支座 固定支座配置有时也被称为固定柱配置,在这种配置中,优傲机器人的协作机器人底座固定在支座上,这是一种配置码垛应用的低成本方式。不过,固定支座配置也存在一些局限性。例如,与垂直第7轴配置(见下文)相比,固定支座在可制造的托盘尺寸方面会受到相当大的限制。此外,由于支座高度会根据特定类型的箱子和托盘布局进行优化,固定支座设置限制了协作机器人可作业的整体区域。尽管存在这些限制,但固定支座配置非常适合小批量、低处理量的码垛应用,而且价格也极具吸引力。 |
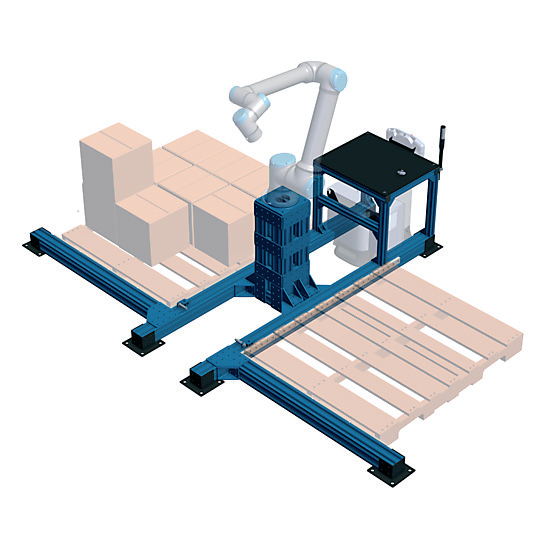
 | 方案二:垂直第7轴 增加垂直第7轴,协作机器人能够水平移动,大幅扩展其工作范围。此类解决方案通常部署在较大的设施中。利用水平通道,你可以同时码垛多个托盘,但这种配置最适合低处理量的作业,这样一来,机器人不必同时出现在每个工位上。你可以让协作机器人在水平轴上的每个工位之间来回穿梭,在四个、五个或更多的托盘上连续作业。为协作机器人额外增加一个(水平或垂直)轴会增加系统的整体复杂性,因此一定要选择与优傲机器人的协作机器人完全兼容的第8轴。即使找到了相兼容的第8轴,预计第8轴配置也需要一些定制化集成。 |
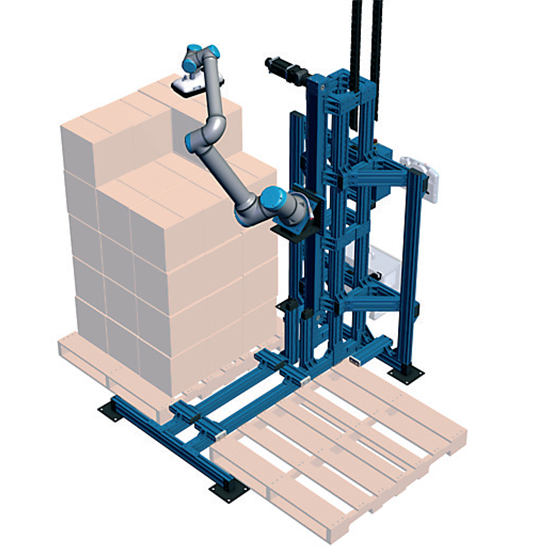
 | 方案三:水平第8轴 在垂直第7轴码垛设置中,协作机器人的底座可以向上和向下移动,扩大了工作范围,使其能够在更大的堆垛高度上进行码垛,从而可以码垛更高的托盘。垂直第7轴设置开辟了广泛的码垛用例,而这些用例是固定机械臂无法完成的。更高的托盘可以大幅降低整体货运成本。增加垂直轴会增加码垛项目的复杂性,因此,一定要选择那些能与优傲机器人的协作机器人完全集成的系统。完全集成的垂直第7轴码垛系统能够简化部署过程,减少停机时间,并降低解决方案的整体总成本。 |
UR机器人可用于大多数包装和码垛应用。优傲机器人占地面积小,节省空间,还可以快速重新编程,并可搭配许多不同的机器一起使用。